Ondes ultrasonores (ministère)
On étudie dans
cet exercice différents phénomènes liés à la propagation des ultrasons. Dans la
première partie, les expériences sont réalisées dans l’air ; dans la seconde
partie, on s’intéresse au principe du sonar, le milieu de propagation étant
l’eau. On peut décrire sommairement le principe de fonctionnement de l’ensemble
émetteur - récepteur d’ultrasons de la manière suivante :l’émetteur contient
une plaquette de céramique qui est mise en vibration par application d’une tension
électrique sinusoïdale. Les vibrations de la plaquette sont communiquées au
fluide qui l’entoure et engendrent une onde ultrasonore sinusoïdale de
fréquence identique à celle de la tension imposée à l’émetteur. Le récepteur
est constitué, comme l’émetteur, d’une plaquette de céramique réceptrice qui
détecte l’onde ultrasonore venant de l’émetteur. La tension électrique qui
apparaît aux bornes du récepteur est de même fréquence que l’onde détectée.
Cette tension est proportionnelle à la pression exercée par le fluide ( ici
l’air ou l’eau ) sur la plaquette réceptrice.
 A. Ultrasons
dans l’air
A. Ultrasons
dans l’air
Données
numériques :
Valeur de la
célérité des ultrasons dans l’air à 25°C : vair = 340 m.s-1.
La fréquence f de l’émetteur est réglée à la valeur 40 kHz, on utilise cette
source dans l’air à 25°C.
Q1
a) Déterminer
la longueur d’onde l de l’onde
ultrasonore générée.
b) La source
est disposée à une distance d du récepteur lui faisant face. Déterminer le retard
avec lequel les vibrations de la source sont transmises au récepteur.
Retard à la
perturbation :
c) Calculer ce
retard pour une distance d = 50 cm.
d)Avec quel
instrument de mesure ce retard peut-il être correctement évalué ? Justifier la
réponse.
On peut
déterminer ce retard à l’aide d’un logiciel d’acquisition voir d’un
oscilloscope à mémoire
Face à la
source ultrasonore, réglée comme précédemment, on place à 10 cm une plaque de
métal trouée d’une fente rectangulaire verticale de largeur réglable, disposée
selon le schéma ci-dessous. On déplace le récepteur en le maintenant à une
distance constante de 40 cm de la fente. Un système d’acquisition permet de
mesurer la tension aux bornes du récepteur. On repère la valeur de l’angle a correspondant aux maxima et aux minima d’amplitude successifs de
la tension sinusoïdale mesurée. Les résultats obtenus pour une largeur de fente
égale à 40 mm sont consignés dans le tableau ci-dessous:
|
Angle a en
degrés |
0 |
12 |
18 |
25 |
|
Amplitude de la
tension sinusoïdale |
Maximum |
Minimum |
Maximum |
Minimum |
 Q2
Q2
a) Quel
phénomène physique est mis en évidence par cette expérience ? La largeur de la
fente a-t-elle une influence sur ce phénomène ?
b) Tous les autres
paramètres de l’expérience restant inchangés, la largeur de la fente est
réduite à 20 mm. Dans quel sens varie la valeur de l’angle d’observation du
premier minimum ?
B. Principe du
sonar
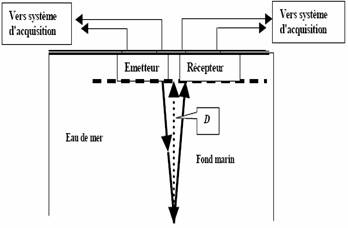
Le sonar est un
dispositif émetteur-récepteur d’ondes ultrasonores qui, remorqué par un navire,
permet d’obtenir des enregistrements donnant une image à deux dimensions des
fonds marins. Les dispositions de l’émetteur et du récepteur sont représentées
schématiquement sur la figure. Les "rayons ultrasonores" qui matérialisent
la direction et le sens de propagation de l’onde ultrasonore sont très peu
inclinés par rapport à la verticale. On considérera donc que le trajet accompli
par l’onde (de l’émetteur vers le fond marin puis, après réflexion, du fond
marin vers le récepteur) se fait quasiment selon la verticale. On utilise ici
une tension sinusoïdale de fréquence f' = 20 kHz pour alimenter
l’émetteur, la longueur d’onde dans le milieu marin étant alors l’ = 7,5 cm.
Q3
a) Calculer la
célérité veau des ondes émises.
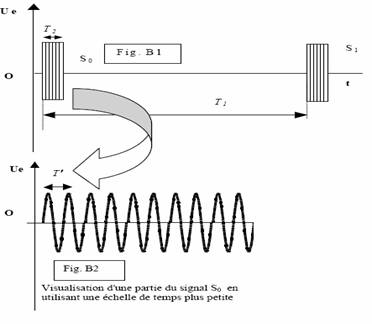
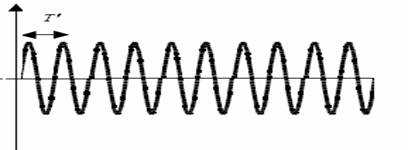
b) L’onde n’est
pas générée par l’émetteur en continu mais par trains d’ondes d’une durée de
0,010 s émis toutes les secondes. Un système d’acquisition permet de visualiser
la tension Ue aux bornes de l’émetteur en fonction du temps. On obtient la
représentation suivante montrant deux trains d’ondes successifs So et S1
(fig. B1).Une visualisation de So est également proposée avec une échelle de
temps plus petite afin de voir les détails du signal (fig. B2) :
b) Utiliser
les données du texte précédent pour déterminer les durées T’, T1 et T2
indiquées sur les schémas. Justifier, le cas échéant, par des calculs.
Q4
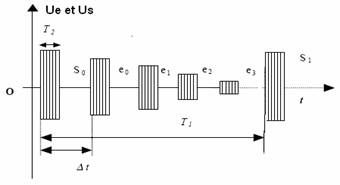 On visualise maintenant une
acquisition qui superpose la tension Ue aux bornes de l’émetteur(signaux S0,
S1.. ) et la tension Us aux bornes du récepteur ( signaux e0,
e1 . ). Les traces e0, e1, e2,e3
matérialisent les différents échos détectés par le récepteur.
On visualise maintenant une
acquisition qui superpose la tension Ue aux bornes de l’émetteur(signaux S0,
S1.. ) et la tension Us aux bornes du récepteur ( signaux e0,
e1 . ). Les traces e0, e1, e2,e3
matérialisent les différents échos détectés par le récepteur.
a) On
appelle Dt le décalage
de temps du premier écho e0 avec le déclenchement du premier signal
électrique à t = 0 s. La valeur de Dt est
suffisamment faible pour que l’on considère l’ensemble émetteur-récepteur comme
fixe par rapport au fond pendant cette durée. Calculer la profondeur D du fond
marin en un lieu où Dt = 0,10s.
b) Proposer une explication
pour l’existence d’échos multiples à intervalles de temps réguliers. Pourquoi
leur amplitude décroît-elle ?
c) Comment qualifier l’onde
dans le milieu marin ? Justifier chaque terme utilisé.
Q5
a) On place un récepteur en
un point M situé à une distance d’ = 18,75 cm de l’émetteur S. Comment vibre le
point M par rapport à S? Pourquoi ?
b) Avec quel retard arrive
la pertubation au point M. L’exprimer par rapport à la période de vibration T’.
c) On représente l’allure
de l’élongation du point S au cours du temps yS. Représenter l’allure
de l ‘élongation du point M sur le schéma suivant :